02
Nov
Cuando necesitamos sustituir un motor eléctrico, la correcta identificación de sus características es fundamental para poder buscar y realizar la selección correcta del mismo. En este artículo, nos centraremos en la identificación de las características principales partiendo de las características de otro motor existente.
Las características básicas en la elección de un motor son la Tensión nominal de trabajo y la Potencia nominal, pero existen otras características específicas que debemos tener en cuenta para determinar el motor adecuado o equivalente.
En especial nos centraremos en la Placa de datos identificativa de los motores, en ella se indica una gran cantidad de información útil sobre su diseño y mantenimiento. Esta información es particularmente valiosa para los instaladores y el personal electrotécnico en el mantenimiento o reemplazo de los motores existentes.
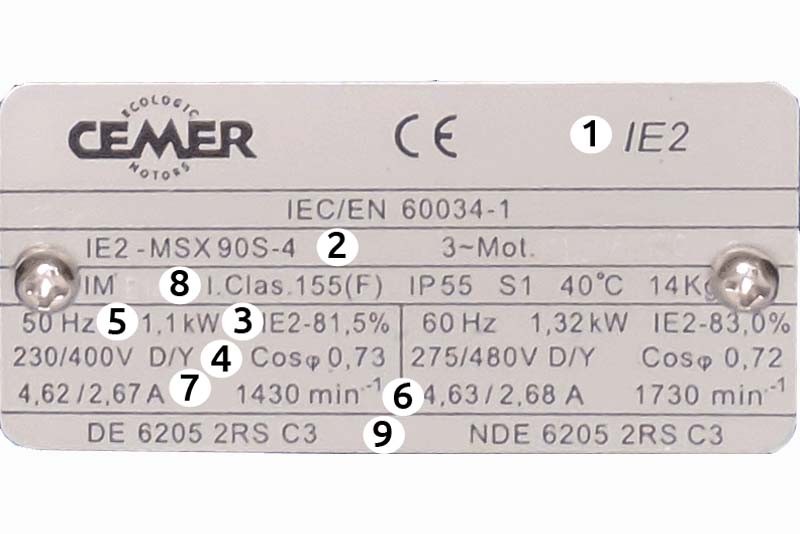
La norma IEC 60034-30:2008 requiere que cada motor debe estar identificado mediante una placa de características que contenga los datos técnicos mínimos. Los datos registrados son:
El concepto de Deslizamiento (pj. 0,953) nos indica la diferencia entre la rotación sincrónica (pj. 1.500 rpm) y la rotación efectiva (1.430 rpm) del motor. Factores como la carga o inclusive la variación de la tensión de la red de alimentación, pueden influenciar en la velocidad de rotación del motor.
El Tipo de carcasa (2) es un dato fundamental en la elección del motor eléctrico, ya que permite identificar gran parte de sus dimensiones mecánicas. Por el tipo de material utilizado principalmente se puede diferenciar entre Aluminio o Fundicón de Hierro
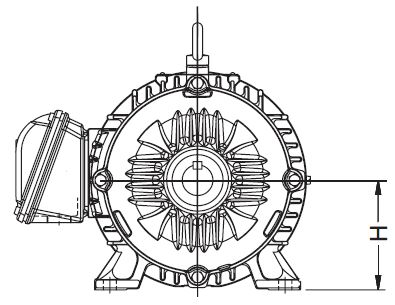 En los motores IEC el Tamaño de la carcasa está definido por la potencia y velocidad del motor y nos indica la distancia (H), desde la base soporte del motor hasta el centro del eje, medida en mm. Esta altura H es exactamente igual al modelo de la carcasa del motor (pj. 90). Los Tamaños normalizados de carcasa son:
56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280,315, 355.
La Forma constructiva (IM), identifica la configuración constructiva de la máquina con relación a su fijación, a la disposición de sus cojinetes y a la punta de eje. Las formas constructivas estan estandarizadas por la norma IEC 60034-7, DIN-42950 y NEMA MG 1-4.03.
La IEC 60072 determinan que la caja de conexión de un motor debe de estar situada de modo que su línea de centro se encuentre en un sector comprendido entre el tope del motor y 10 grados por debajo de la línea de centro horizontal de éste, del lado derecho, cuando el motor es visto desde el lado del accionamiento.
Las formas constructivas básicas son:
IM B3 – Con carcasa con patas para montaje sobre una subestructura.
En los motores IEC el Tamaño de la carcasa está definido por la potencia y velocidad del motor y nos indica la distancia (H), desde la base soporte del motor hasta el centro del eje, medida en mm. Esta altura H es exactamente igual al modelo de la carcasa del motor (pj. 90). Los Tamaños normalizados de carcasa son:
56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280,315, 355.
La Forma constructiva (IM), identifica la configuración constructiva de la máquina con relación a su fijación, a la disposición de sus cojinetes y a la punta de eje. Las formas constructivas estan estandarizadas por la norma IEC 60034-7, DIN-42950 y NEMA MG 1-4.03.
La IEC 60072 determinan que la caja de conexión de un motor debe de estar situada de modo que su línea de centro se encuentre en un sector comprendido entre el tope del motor y 10 grados por debajo de la línea de centro horizontal de éste, del lado derecho, cuando el motor es visto desde el lado del accionamiento.
Las formas constructivas básicas son:
IM B3 – Con carcasa con patas para montaje sobre una subestructura.
IM B5 o IM B14 – Sin patas con fijación mediante Brida Se debe tener en cuenta que los motores se diseñan para trabajar en posición horizontal, cuando se instala en posición vertical eje-hacia-arriba o eje-hacia-abajo, el rodamiento de la parte superior soporta el peso del eje y el rotor, lo que se traduce en un esfuerzo axial suplementario.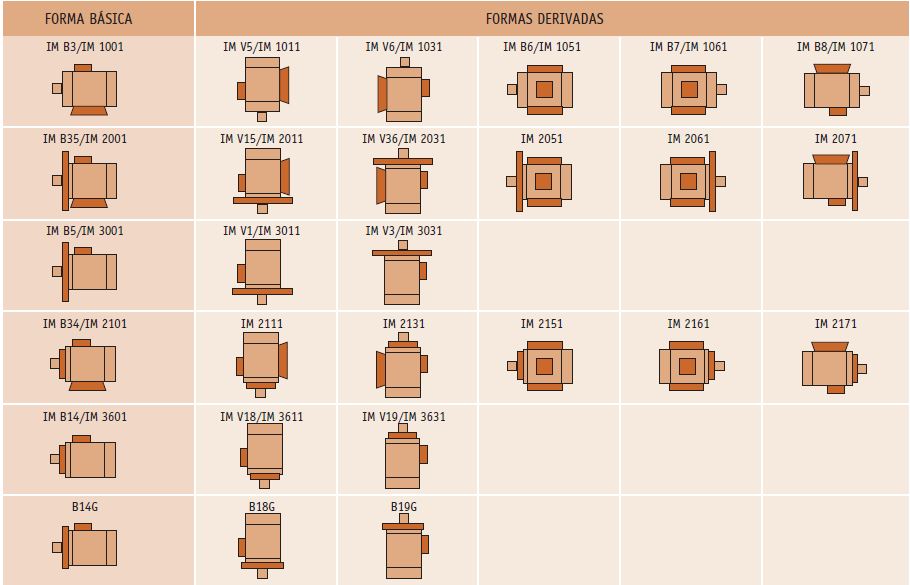 En Resumen:
A la hora de seleccionar un motor los Datos Básicos que debemos tener en cuenta son:
En Resumen:
A la hora de seleccionar un motor los Datos Básicos que debemos tener en cuenta son:
- 1 - Logo/marca y clase de eficiencia IE1, IE2 IE3 o IE4 (IE2)
- 2 - Referencia/Tipo (IE2-MSX 90S 4): clase de eficiencia (IE2), serie (MSX), Tamaño (90S) y polos (4)
- 3 - Potencia nominal (1,1 KW -> 1.100/736 = 1,5 CV)
- 4 - Tensión nominal 230/400 V ∆/Y (V∆(triangulo) = 230 V / VY((estrella)=400 V)
- 5 - Frecuencia nominal 50 o 60 Hz (50 Hz))
- 6 - Revoluciones de servicio a 50 Hz (1.430 rpm aprox 1.500 rpm)
- 7 - Intensidad nominal a 50 Hz (I∆ = 4,62 A / IY=2,67 A)
- 8 - Otras características:
- 9 - Tipo de rodamientos (Delantero (DE) 6205 2RS C3, Trasero (NDE) 6205 2RS C3)
- - IM: Forma constructiva
- - Protección IP
- - Tipo de Servicio (S1 a S10)
- - Temperatura de servicio (40ºC)
| nº de Polos | 50 Hz | 60 Hz |
| 2 Polos | 3.000 rpm | 3.600 rpm |
| 4 Ppolos | 1.500 rpm | 1.800 rpm |
| 6 Polos | 1.000 rpm | 1.200 rpm |
| 8 Polos | 750 rpm | 900 rpm |
IM B5 o IM B14 – Sin patas con fijación mediante Brida Se debe tener en cuenta que los motores se diseñan para trabajar en posición horizontal, cuando se instala en posición vertical eje-hacia-arriba o eje-hacia-abajo, el rodamiento de la parte superior soporta el peso del eje y el rotor, lo que se traduce en un esfuerzo axial suplementario.
- - Potencia nominal (KW / CV)
- - Revoluciones nominales (3000/1500/1000/750 rpm)
- - Tensión de trabajo (Monofásico/Trifásico, Tensión nominal (Voltios)/Tensión nominal para instalación en triangulo ∆ (Voltios)/y en estrella Y (Voltios).
- - Frecuencia nominal (Hz) (En España 50 Hz)
- - Clase de eficiencia IE1, IE2 IE3 o IE4. (ver articulo)
- - Nivel de protección IP o la protección del motor a la entrada de cuerpos extraños (polvo, fibras, etc.), contacto accidental y penetración de agua.(ver articulo)
“La placa de características de un motor es como el carnet de identidad del motor, a partir de ella podemos conocer los datos fundamentales que lo definen."
| Motores Trifásicos IE2 Motores trifásicos asícronos de alta eficiencia IE2 de, 2,4,6 y 8 polos de 0,12 CV a 430 CV disponibles en los tipos B3, B5, B14 y tensiones de 230/400 V o 400/690 50/60 Hz. Ver productos |
 |