Rara vez las máquinas funcionan de acuerdo con las velocidades que les ofrece un motor standard (750, 1.000, 1.500 o 3.000 rpm), por regla general esta velocidad deberá adaptarse a las condiciones de uso o funcionamiento del equipo.
Los reductores son sistemas de engranajes que permiten que a partir de una velocidad de entrada podamos obtener una velocidad de salida distinta.
Concepto de relación de reducción en un motorreductor
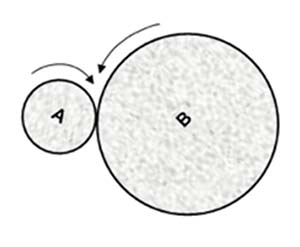
Si acoplamos dos engranajes como se indica en la figura, el giro de la rueda “A” hará que a su vez gire la rueda “B” pero serán necesarias un determinado número de vueltas de la rueda A para que la rueda B de una sola vuelta. Esto se debe a que la longitud exterior de la rueda A es inferior a la longitud exterior de la rueda B, es decir el número de vueltas que debe dar la rueda A para hacer girar una vuelta la rueda B es proporcional a su longitud y por ello a su diámetro.
La relación de transmisión se calcula en base a los diámetros (o los radios) entre pares de ruedas que se transmiten el movimiento directamente. A continuación, se presenta la ecuación que nos muestra la relación de transmisión en sistemas de poleas.

Siendo:
i: la relación de transmisión
ns: la velocidad de salida
ne: la velocidad de entrada
de: el diámetro de la rueda de entrada
ds: el diámetro de la rueda de salida.
Si la relación de reducción "i" fuese 3, significa que por cada 3 vueltas de la rueda A, la rueda B giraría una vuelta
Concepto de Par en un motorreductor
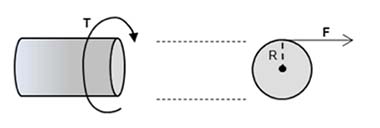
El par motor, también conocido como torque, se expresa en Newton metro (Nm) y se define como el momento o fuerza que ejerce un motor sobre el eje de transmisión de potencia haciéndolo girar sobre sí mismo a una determinada velocidad
Par (M) = Fuerza (Kg) X R (m) [Kg.m] ---> 1 Kilogramo-fuerza = 9,81 Newton
Concepto de Potencia
La potencia es el trabajo o la energía desarrollada por unidad de tiempo en una máquina. La potencia de un motor para una velocidad determinada se obtiene, del producto del valor de par motor que es capaz de mantener a esa velocidad.
M X n
P = -------------
9550
Siendo:
M = Par en Nm
n = Velocidad en rpm
P = Potencia en Kw
Tipos de reductores
En función de la configuración o mecanismo de reducción podemos distinguir basicamente 3 tipos de reductores mecánicos:
| Reductores Sin Fin Corona |  |
 |
| Reductores Helicoidales |  |
 |
| Reductores Planetarios |  |
 |
Los factores principales para la elección del tipo de reductor son: el par de salida necesario, la velocidad de entrada y salida, el factor y características de servicio.
En siguientes artículos se tratará detenidamente todos estos factores.
Posts Recomendados